Что нового
Новая версия CAMIO демонстрирует серьезную приверженность и направленность развития платформы, а также новые ключевые функциональные возможности и значительные достижения, в частности, в области автоматизированного программирования.
- Полная поддержка лазерного сканера SLK20 VIVID CMM.
- Режим CW43L для измерительной головки PHS2.
- Поддержка конструктора зондов для PH6M и дополнительных звездных щупов.
- Улучшены метки отчетов о превышении допустимых значений и мин/макс.
- Дополнительный выход арматуры и фильтрации.
- Настройки представления свойств, связанные с окном допуска.
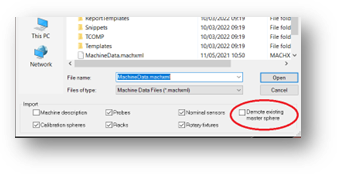
- Улучшен импорт мастер-сфер.
- Улучшенное определение сферы с помощью CAD.
- Новое расстояние смещения для измерения сферы.
- Улучшена обработка ошибок для ошибок зонда.
- Новая команда GOPARK position DMIS.
- Улучшенное извлечение признаков дуг и линий из кривых.
- Вывод новых отдельных точек для допусков профиля.
- Допуск концентричности ISO GD&T с двумя базовыми точками.
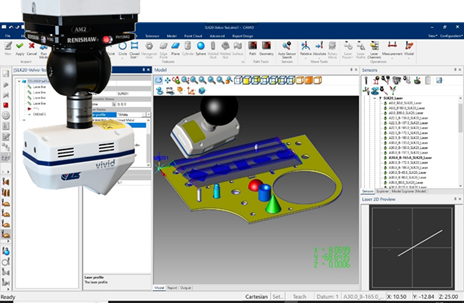
Поддержка нового лазерного сканера SLK20
Первый выпуск CAMIO с полной поддержкой лазерного сканера SLK20 VIVID CMM
- Контроль поверхности свободной формы
- Измерение геометрических характеристик
- Генерация траектории сканирования на основе CAD.
- Преподавание и обучение программированию онлайн
- Автономное программирование и моделирование.
- Окно предварительного просмотра 2D в реальном времени.
- Настройки мультиэкспозиционного сканера.
- Фильтрация и зацепление облака точек.
- Управление калибровкой лазера.
- Автоматизированная смена зондов.
- CAMIO PCA (анализ облака точек).

Новый режим CW43L для измерительной головки PHS2
- Теперь головки PHS2 можно использовать в режиме головки CW43L.
- Эта новая функциональность позволяет использовать существующую программу DMIS для головки датчика CW43L с головкой датчика PHS2.
- PHS2 имитирует движения CW43L, используя угол A CW43L в качестве угла E PHS2 и угол B, обратный углу B CW43L, в качестве угла D PHS2.
PH6M многопроволочная фиксированная головка зонда
Probe Designer теперь поддерживает многопроводную измерительную головку OH6M.
Датчик PH6M с автоматическим соединением совместим со сканирующим датчиком SP25M, а также со всей линейкой датчиков компании Renishaw при использовании адаптеров для установки датчиков серии PA.

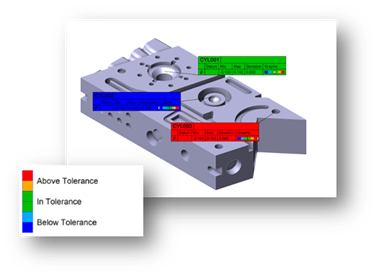
Улучшенные ярлыки отчетов
Ярлыки отчетов теперь поддерживают автоматические цвета фона для выделения особенностей, выходящих за пределы допусков.
Фон этикетки меняет цвет в зависимости от наиболее выходящего за пределы допустимого значения регистрируемого признака.
Цветовой градиент использует текущий стиль цветовой панели и предоставляет возможность настройки используемых цветов.
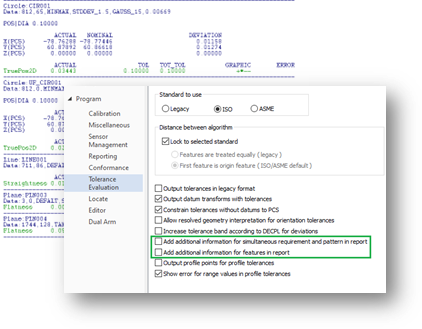
Дополнительный выход для подгонки и фильтрации
Новые опции оценки допусков поддерживают вывод дополнительных комментариев для характеристик и моделей/одновременных требований в выходные файлы CSV и DMIS.
Дополнительный вывод относится к команде GEOALG и фильтрации точек для характеристик, измеренных с помощью тактильного сканирования.
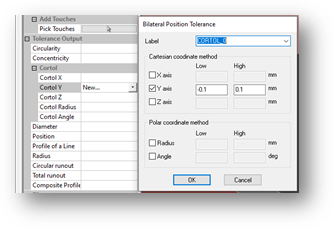
Вид свойств Связанный допуск двустороннего положения
Окно Bilateral Position Tolerance теперь по умолчанию устанавливает выбранные параметры при вызове из представления свойств.
Также можно одновременно выбрать и добавить несколько вариантов в Путь обучения.
Улучшенный импорт мастер-сферы
При импорте мастер-сферы с именем, отличным от имени текущей мастер-сферы, добавлена возможность сделать импортированную или текущую мастер-сферу сферой-спутником.

Дополнительная поддержка Star Stylus
- Probe Designer теперь поддерживает еще три стандартных звездчатых щупа Renishaw.
- M2 4-сторонняя звезда, рубиновые шарики Ø0,5 мм, размах 10 мм.
- Звезда M2 4 шарика, рубиновые шарики Ø1 мм, размах 10 мм.
- Пятиходовая звезда M2, рубиновые шарики Ø2 мм, размах 18 мм.
Улучшенная обработка ошибок DMIS
Ошибка отсутствия вооружения зонда: Если при обработке ошибок установлена метка строки 'Jump To' и произошла ошибка "зонд не взят на охрану", выполнение программы перейдет к указанной метке строки программы.
Новая команда GOPARK
Для программы DMIS добавлена поддержка команды 'GOPARK'. Эта новая команда обеспечивает управление на уровне DMIS отправкой КИМ для определения положения парка.
Улучшенное построение характеристик
В окне построения теперь отображается количество измеренных точек для каждого объекта. Опция Point Buffer для выбора всех точек измерения теперь может быть применена к группе для выбранных объектов.
Новое смещение измерения сферы
Теперь к сферам, измеренным с помощью контактного или сканирующего датчика, можно применять расстояние смещения измерения.
Расстояние смещения применяется относительно экватора и полюса сферы, как определено направлением сферы. Пути стратегии измерения распределяются равномерно, причем первый путь находится на расстоянии смещения от экватора.
Улучшенное извлечение дуг и линий
Для более точного и надежного извлечения характеристик из кривых команда XTRACT была усовершенствована новыми параметрами поиска.
Новые параметры поиска 'Размер радиального поиска линии' и 'Размер касательного поиска линии' при извлечении линий из кривых.
Новые параметры поиска 'Размер радиального поиска дуги' и 'Размер поиска длины дуги' при извлечении дуг из кривых.
Улучшенный выход на допуск профиля
Оценка допусков была улучшена благодаря новой настройке для создания отчетов по отдельным точкам допуска профиля.
Новая настройка может быть применена к плоскости, цилиндру, конусу и сфере.
Улучшенный допуск концентричности ISO
Отчетность по концентричности с использованием стандарта ISO GD&T теперь позволяет выбрать до двух базовых точек. Например, теперь можно сообщать о концентричности элемента относительно плоскости и окружности.
Улучшенные метки минимума/макса отчета
Метки Min/Max отчета теперь можно различать, добавляя текст 'Min' или 'Max', в дополнение к текущему тексту названия функции.
Улучшенное определение сферы
При определении сферы в CAD-виде направление сферы теперь легче задать с помощью мыши.
При перемещении мыши по выбранной сфере выбор направления сферы привязывается к ближайшей оси текущей системы координат детали.